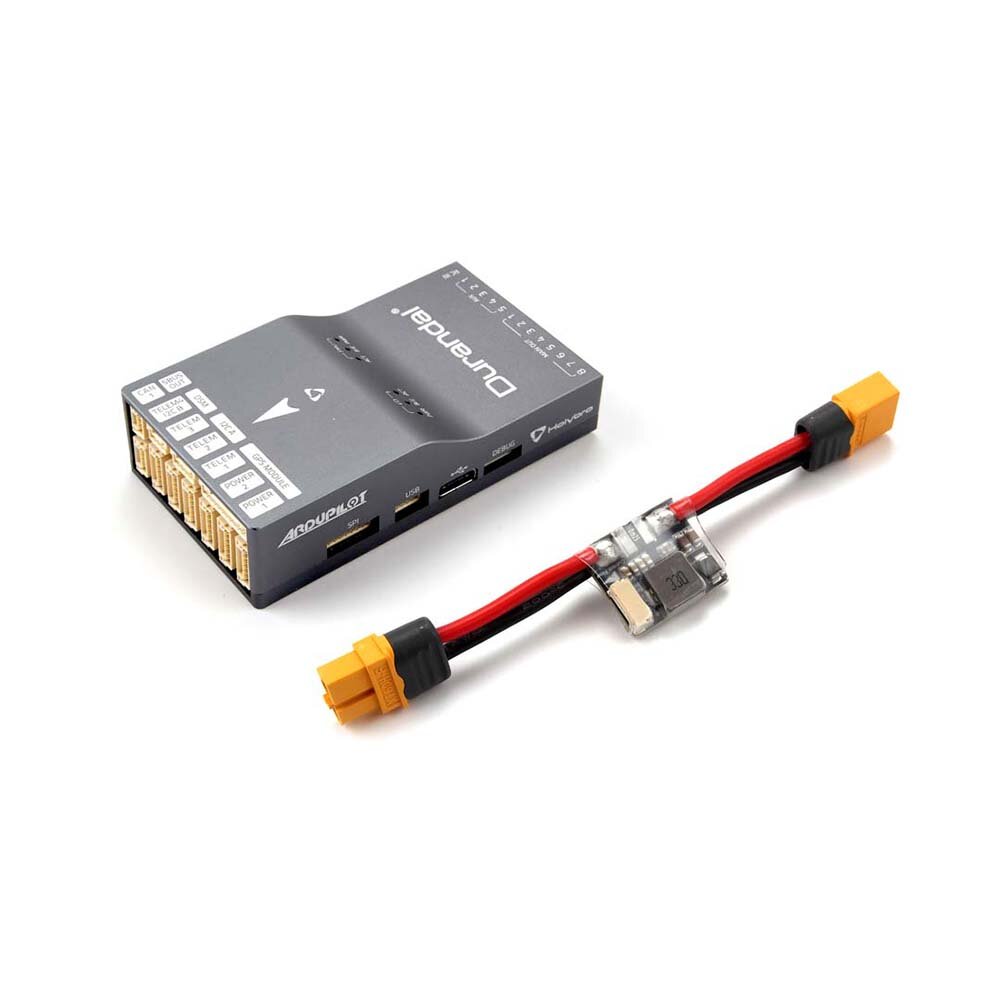










Ενότητα τροφοδοτικού Holybro Durandal PM02 V3 για Drone FPV Racing RC
COD
Μάρκα: Holybro
{{$productInfo.reviewAmount.average}} εκτός 5
- 5 Αστέρι 0 (NaN%)
- 4 Αστέρι 0 (NaN%)
- 3 Αστέρι 0 (NaN%)
- 2 Αστέρι 0 (NaN%)
- 1 Αστέρι 0 (NaN%)
ID: 1923625
Πωληθεί: 0
SKUI88694
Αποθέματα: 0
US$00.00
Lowest price in 7 days
Ειδοποίηση τιμής
Ενδέχεται να ισχύουν φόροι επί των πωλήσεων κατά το ταμείο
Αποστολή από:
QTY:
Μαζική παραγγελία
Αυτό χαρακτηρίζεται ως παραγγελία χονδρικής, υποβάλετε μια ερώτηση για να λάβετε την καλύτερη τιμή μας.Ζητήστε τώρα!
ΔΕΝ ΜΠΟΡΩ αποστολή προς
Αποστολή: US$00.00
προς το Greece μέσω
Ωρα άφιξης = επιστολή + ώρα αποστολής
Πληρωμή κατάθεσης
Υπόλοιπο πληρωμής